
|
|
Forum Index : Microcontroller and PC projects : (*M) Wii Nunchuck Demo
| Author | Message | ||||
crackerjack Senior Member Joined: 11/07/2011 Location: AustraliaPosts: 164 |
Hi all, After playing about with the Wii Nunchuck and Maximite for some time, I have put together a program which I believe demonstrates most of the capabilities of the Wii Nunchuck and the ease with which the device can be used as an interface to the Maximite. I expect that this code could be used with a Duinomite, but I have not tried it. My DM is currently a MM in disguise of 3.1; also the demo code assumes VGA use. The code listing is included at the end of this post (for your reading pleasure) and also in an attached ZIP file should you want to try it out at home. A screengrab follows with some explanatory notes. The usual "this is free; and I accept no liability for anything you may do to yourself or anybody else, what you may break, or set on fire as a result of your use or abuse of this code, etc." clause applies. 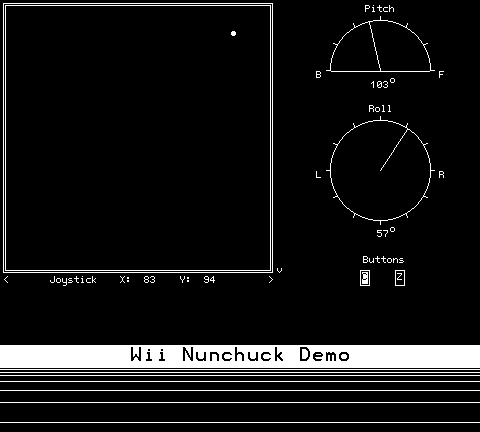
2012-02-22_204336_wii_demo.zip The code is necessarily a bit heavy on the Trigonometry side. This is because unlike previous code seen for the Maximite using the Wii, the values coming back from the accelerometer are not just displayed as raw values, but actually degrees of Roll and Pitch. A full 360 degrees of Roll is provided, and almost 180 degrees of Pitch. The Wii Nunchuck does not really have a useable Yaw axis, but the other two axes, the button states and the joystick values and position are shown visually in the demo. Also, the direction of the Joystick (rather than position, and which may be useful for some implementations such as games, etc.) is shown by arrows at the top and right edges of the Joystick "zone". Using dedicated fonts for these arrows instead of < > ^ and v ASCII characters would have been nice, but you get the idea.... Since the Maximite does not have a full suite of Inverse Trig. functions, two of these (ACOS and ATAN2) are implemented as Sub's. ATAN2 is of particular interest in this application because it is used to find direction (ATAN cannot be used for this purpose). There are some constants used in the code which may vary between Nunchucks. I have three and there was little variation between them, but you may want to experiment. To calibrate the Joystick, push both the C and Z buttons at once while leaving the Joystick in it's neutral position. I believe a number of new and useful features of MMBasic 3.1 have been used: Call-able subroutines, the Print @ statement with modes, and so on... Some immediate optimisation opportunites exist - for example the many Pi/180 and Pi*180 usages could be replaced by constants; there are others too. There is an area of useless decorative display at the bottom of the screen to take up some space which was free (and who doesn't like taking something that's free?) Lastly, parts of the code were based on an Arduino library for the Wii Nunchuck. Credits are given in the code and a reference to the original website is given. For the adventurous, you may want to try interfacing the Maxi via Serial to a PC running the Processing "RGB Cube" code which the Arduino library references. The appropriate code is in the demo, but commented out. I tried it out and it was pretty cool to spin a colourful cube image on my PC using a Nunchuck via my beloved Maximite. There are posts elsewhere on this forum explaining how to wire up a Wii Nunchuck to a Maximite and where to obtain the devices for a pittance, etc. Enjoy, improve and share. crackerjack. ' Maximite Wii Nunchuck Demo - crackerjack 02/2012 ' ' Credit to Tim Hirzel, Tod E. Kurt & Windmeadow Labs ' ...and the many others upon whose shoulders we stand. ' ' Based on, and adapted for MMBasic 3.1 from code at: ' http://arduino.cc/playground/Main/WiiChuckClass ' ------------------------------------------------------ ' Constants - mainly for display pdy=70 ' Pitch Dial Y pdx=380 ' Pitch Dial X rdy=170 ' Roll Dial Y rdx=380 ' Roll Dial X dr=49 ' Dial Radius th=-55 ' Joystick Direction Threshold Dim RDBuff(6) ' Wii Read Buffer Cls GoSub ScreenSetup ' Use the Serial output if using with the RGB Cube display as per above website 'Open "COM2:19200" As #1 i2cWii = &h52 ' Wii Nunchuck address I2CEN 400, 100 ' Enable I2C I2CSEND i2cWii, 0, 2, &hF0, &h55 I2CSEND i2cWii, 0, 2, &hFB, &h0 ' Some constants (may vary for Nunchucks) Zero_X = 510 Zero_Y = 490 Zero_Z = 500 Zero_Joy_X = 141 ' These are set by Calibration... Zero_Joy_Y = 139 ' ...press the C & Z buttons together Radius = 220 Timer = 0 ' Main Loop Do timed = Timer ' Hello Nunchuck, tell me how ya doin'? I2CSEND i2cWii, 0, 1, &h0 I2CRCV i2cWii, 0, 6, RDBuff(0) ' Calculations on the returned data Joy_X = RDBuff(0) - Zero_Joy_X Joy_Y = RDBuff(1) - Zero_Joy_Y Joy_Left = (Joy_X < th) Joy_Right = (Joy_X > Zero_Joy_X + th) Joy_Down = (Joy_Y < th) Joy_Up = (Joy_Y > Zero_Joy_Y + th) ' Not using full 10-bit resolution - just too noisy! Acc_X=(RDBuff(2) * 4) - Zero_X Acc_Y=(RDBuff(3) * 4) - Zero_Y Acc_Z=(RDBuff(4) * 4) - Zero_Z ' Roll If Acc_Z <> 0 Then ATan2 (Acc_Z, Acc_X) Roll=Fix(Atan2/Pi*180) EndIf ' Using a Constant instead, but you may want to experiment 'Radius = Sqr(Acc_X^2 + Acc_Y^2 + Acc_Z^2) ' Pitch Acos (Acc_Y / Radius) Pitch = Fix((Acos)/Pi * 180) ' Buttons Button_Z = Not((RDbuff(5) And &h01)) Button_C = Not((RDbuff(5) And &h02)) 'Calibration If Button_C And Button _Z Then GoSub Calibrate EndIf ' Serial data out 'Print #1 Roll "," Pitch "," ACC_X "," Acc_Y "," Acc_Z Chr$(13) ' Display all Current Values ' Buttons Print @(rdx-18, rdy+102, Button_C*2) "C" Print @(rdx+17, rdy+102, Button_Z*2) "Z" ' Pitch & Roll Line(pdx,pdy)-(pdx+dr*(Cos(Pitch*(Pi/180))),pdy-dr*(Sin(Pitc h*(Pi/180)))),1 Line(rdx,rdy)-(rdx+dr*(Cos(Roll*(Pi/180))),rdy-dr*(Sin(Roll* (Pi/180)))),1 Print @(pdx-15,pdy+10) Format$(Pitch, "%4.0f") Print @(rdx-15,rdy+dr+10) Format$(Roll, "%4.0f") ' Joystick, first show direction. Some font usage would be better... Print @(4,275,Joy_Left*5) "<": Print @(268,275,Joy_Right*5) ">" Print @(277,4,Joy_Up*5) "^" : Print @(277,265,Joy_Down*5) "v" ' Now show positionn and values Print @(120,275) "X:" Format$(Joy_X, "%4.0f") Print @(180,275) "Y:" Format$(Joy_Y, "%4.0f") Circle(Zero_Joy_X+Joy_X+10,Zero_Joy_Y-Joy_Y-10),2,1,F ' Send Serial 'Print #1, Roll "," Pitch "," Acc_X "," Acc_Y "," Acc_Z ' Give the Wii Nunchuck some time before we go around again Timed = Timer - timed Max (100, timed) Pause Max ' Cleanup Line(pdx,pdy)-(pdx+dr*(Cos(Pitch*(Pi/180))),pdy-dr*(Sin(Pitc h*(Pi/180)))),0 Line(rdx,rdy)-(rdx+dr*(Cos(Roll*(Pi/180))),rdy-dr*(Sin(Roll* (Pi/180)))),0 Circle(Zero_Joy_X+Joy_X+10,Zero_Joy_Y-Joy_Y-10),2,0,F Loop Close #1 ' Code execution can never get here, but best to be neat. ' ROUTINES ' ------------------------------------------------------ ' Setup the Display ' ----------------- ScreenSetup: Font 2,1,1 Print @(0,345) " Wii Nunchuck Demo " Font 1,1,0 v=1 For t=1 To 11 Line(0,364+v)-(MM.HRes,364+v),1 v=v * 1.5 Next t ' Buttons Print @(rdx-17,rdy+85) "Buttons" Line(rdx-20,rdy+100)-(rdx-11,rdy+115),1,b Line(rdx+15,rdy+100)-(rdx+24,rdy+115),1,b ' Joystick Zone Print @(50,275) "Joystick" Line(3,3)-(272,272),1,b Line(5,5)-(270,270),1,b ' Pitch Dial Print @(pdx-15,pdy-dr-17) "Pitch" Circle(pdx,pdy),dr+1,1 For t=Pi/2 To (Pi*2-(Pi/2)) Step Pi/6 tx=Sin(t) : ty=Cos(t) Line(pdx+tx*(dr+1),pdy+ty*(dr+1))-(pdx+tx*(dr+5),pdy+ty*(dr+ 5)) Next t Line(pdx-dr-1,pdy+1)-(pdx+dr+1,pdy+dr+1),0,BF Line(pdx-dr,pdy+1)-(pdx+dr,pdy+1),1 Print @(pdx-dr-15,pdy) "B" Print @(pdx+dr+10,pdy) "F" Print @(pdx+10,pdy+5) "o" ' Roll Dial Print @(rdx-11,rdy-dr-17) "Roll" Circle(rdx,rdy),dr+1,1 For t=Pi To Pi*4 Step Pi/6 tx=Sin(t) : ty=Cos(t) Line(rdx+tx*(dr+1),rdy+ty*(dr+1))-(rdx+tx*(dr+5),rdy+ty*(dr+ 5)) Next t Print @(rdx-dr-15,rdy) "L" Print @(rdx+dr+10,rdy) "R" Print @(rdx+10,rdy+dr+5) "o" Return ' Calibrate the Joystick ' ---------------------- Calibrate: Zero_Joy_X = RDBuff(0) Zero_Joy_Y = RDBuff(1) Print @(200,407) "Calibrating..." ' Redraw the screen, in case we have messed it up with uncalibrated movements GoSub ScreenSetup Print @(200,407) " " Return ' SUBS ' ==== ' Calculate ACOS ' -------------- Sub Acos(y) If Fix(y) = 1 Then Acos = 0 ElseIf Fix(y) = -1 Or Sgn(-y * y + 1) = -1 Then Acos = Pi Else Acos = Atn(-Y / Sqr(-y * y + 1)) + 2 * Atn(1) EndIf End Sub ' Calculate ATAN2 ' --------------- Sub Atan2(y, x) Atan2=2*Atn(y/(Sqr(x^2+y^2)+x)) End Sub ' Max ' --- Sub Max(a, b) If a > b Then Max = a Else Max = b EndIf End Sub |
||||
| Geoffg Guru Joined: 06/06/2011 Location: AustraliaPosts: 3363 |
This is getting better and better. My Nunchuck arrived today and against wise advice I am going to hack off the connector and solder it in, just so I can try this ASAP. BTW. 3.2 will have functions that will work very much like the way that you used subroutines. So, with 3.2, you will be able to do: Roll = Fix(ATan2(Acc_Z, Acc_X)/Pi*180)
... Function Atan2(y, x) Atan2 = 2*Atn(y/(Sqr(x^2+y^2)+x)) End Function Thanks for a great demo, Geoff P.S. Does anyone know why are they called Nunchucks? Geoff Graham - http://geoffg.net |
||||
| Olimex Senior Member Joined: 02/10/2011 Location: BulgariaPosts: 226 |
http://en.wikipedia.org/wiki/Nunchaku don't tell me you never have seen Bruce Lee movie 
|
||||
| Geoffg Guru Joined: 06/06/2011 Location: AustraliaPosts: 3363 |
My education is obviously lacking. That is an effective weapon, by my rough count he took out 25 bad guys with it. Geoff Graham - http://geoffg.net |
||||
| rodent59 Newbie Joined: 02/03/2012 Location: AustraliaPosts: 7 |
Hi Crackerjack Thanks for the code and ideas. I'd like to understand how your Defined Subroutines work please. I refer to the ATan2 and Acos subs. You define subs by those names. When called they create a variable with the same name as the sub name, and you then assign your result to that variable. My question is: When you then use that variable (e.g. Roll=Fix(Atan2/Pi*180)), how does the interpreter know you are referring to the variable rather than the same-named sub used without any arguements? Is it that a sub call must always be a separate line (not embedded) and Roll=Fix(Atan2/Pi*180), when parsed, simply cannot refer to anything but the variable by that name? Many thanks, Rod. ****************** ' Roll If Acc_Z <> 0 Then ATan2 (Acc_Z, Acc_X) Roll=Fix(Atan2/Pi*180) EndIf ' Pitch Acos (Acc_Y / Radius) Pitch = Fix((Acos)/Pi * 180) ' Calculate ACOS ' -------------- Sub Acos(y) If Fix(y) = 1 Then Acos = 0 ElseIf Fix(y) = -1 Or Sgn(-y * y + 1) = -1 Then Acos = Pi Else Acos = Atn(-Y / Sqr(-y * y + 1)) + 2 * Atn(1) EndIf End Sub ' Calculate ATAN2 ' --------------- Sub Atan2(y, x) Atan2=2*Atn(y/(Sqr(x^2+y^2)+x)) End Sub ' Max ' --- Sub Max(a, b) If a > b Then Max = a Else Max = b EndIf End Sub |
||||
| crackerjack Senior Member Joined: 11/07/2011 Location: AustraliaPosts: 164 |
Hi Rod, I guess I used a little bit if license in my usage of defined Sub's and variable names to make things more resemble what Geoff has indicated is coming in 3.2 The way it works is (using ATan2 as an example): The variable ATan2 is first used in the Sub of the same name and is by default a Global variable. After a call is made to the sub - the interpreter identifies it as a call to a sub by the following space and left bracket - the variable now holds the value which is then used as per normal (without a space and left bracket following, so the interpreter knows it is just a variable not a Sub call). Hope that makes sense. I suspect things will be more simple in the next version of MMBasic. Cheers. |
||||
| rodent59 Newbie Joined: 02/03/2012 Location: AustraliaPosts: 7 |
Thanks Crackerjack. All understood. Rod. |
||||
| Nick Guru Joined: 09/06/2011 Location: AustraliaPosts: 512 |
I have my Wii Nunchuck ($4 at Cash Converters) and I've decided to chop the plug and wire it directly to the port connector. Which of the 4 wires go where? There is a red, yellow, white and green (+ gold for earth). Reading Geoff's manual, I2c uses pins 12 and 13? Anyone directly wired one of these to tell me which colours go where? |
||||
| crackerjack Senior Member Joined: 11/07/2011 Location: AustraliaPosts: 164 |
Nick - see this post: http://www.thebackshed.com/forum/forum_posts.asp?TID=4312 which has the details and links that will help you. |
||||
| The Back Shed's forum code is written, and hosted, in Australia. | © JAQ Software 2026 |
